
蓝牙怎么传app给对方手机
先导知识
STM32入门笔记(02):AFIO复用端口与重映射 、NVIC中断优先级管理、外部中断、串口通信及串口实验(SPL库函数版)控制流程
手机APP ——蓝牙通信——> 蓝牙TBO4模块 ——UART2串口通信 ——> MCU STM32F407
硬件设计
硬件准备:
1.STM32F407VET62.无线蓝牙串口透传BT04从机

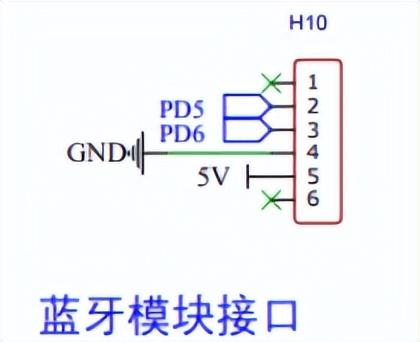
BL(蓝牙)
MCU (F407)
Rx
PD5 (USART2_TX)
Tx
PD6 (USART2_RX)
软件工具:
1.FlyMcu 程序串口烧录2.XCOM V2.0 串口调试助手3.蓝牙APP(用于测试遥控)
A
B
C
D
E
F
G
H
1
2
3
4
5
6
7
8
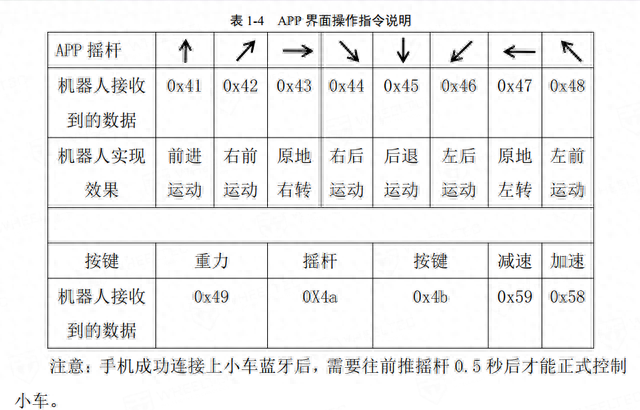
前
右前
右
右后
后
左后
左
左前

软件设计工程目录: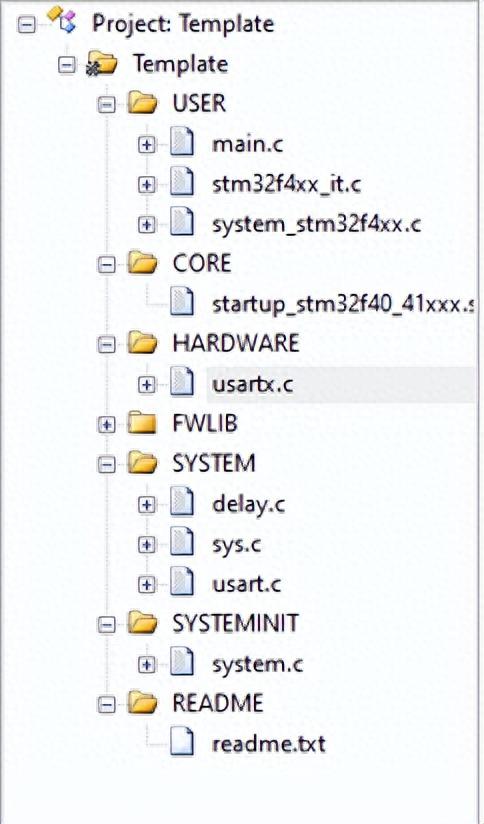
usartx.h文件
#ifndef __USRATX_H#define __USRATX_H #include "stdio.h"#include "sys.h"#include "system.h"void uart2_init(u32 bound);int USART2_IRQHandler(void);void usart2_send(u8 data);#endif
usartx.c文件
#include "usartx.h"/**************************************************************************函数功能:串口2初始化入口参数:无返回 值:无**************************************************************************/void uart2_init(u32 bound){ GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE); //使能GPIO时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); //使能USART时钟 GPIO_PinAFConfig(GPIOD,GPIO_PinSource5,GPIO_AF_USART2); GPIO_PinAFConfig(GPIOD,GPIO_PinSource6 ,GPIO_AF_USART2); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF; //输出模式 GPIO_InitStructure.GPIO_OType=GPIO_OType_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //高速50MHZ GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOD, &GPIO_InitStructure); //初始化 //UsartNVIC配置 NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; //抢占优先级 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ; //子优先级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //IRQ通道使能 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //根据指定的参数初始化VIC寄存器 NVIC_Init(&NVIC_InitStructure); //初始化设置 USART_InitStructure.USART_BaudRate = bound; //串口波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止 USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART2, &USART_InitStructure); //初始化串口2 USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); //开启串口接受中断 USART_Cmd(USART2, ENABLE); //使能串口2 }/**************************************************************************函数功能:串口2接收中断入口参数:无返回 值:无**************************************************************************/int USART2_IRQHandler(void){ int Usart_Receive; if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //判断是否接收到数据 { static u8 Flag_PID,i,j,Receive[50],Last_Usart_Receive; static float Data; Usart_Receive=USART2->DR; //读取数据 printf("Usart_Receive=%d \r\n",Usart_Receive); if(Usart_Receive==0x41&&Last_Usart_Receive==0x41&&APP_ON_Flag==0)// 0x41:0100 0001 //开机10秒之后,按下APP的前进键进入APP控制模式 //APP控制标志位置1,其它标志位置0 PS2_ON_Flag=0,Remote_ON_Flag=0,APP_ON_Flag=1,CAN_ON_Flag=0,Usart_ON_Flag=0; Last_Usart_Receive=Usart_Receive; if(Usart_Receive==0x4B) //0x4B:0100 1011 — 75 Turn_Flag=1; //进入APP转向控制界面// printf("Turn_Flag=1 进入APP转向控制界面 \r\n"); else if(Usart_Receive==0x49||Usart_Receive==0x4A) //0x49:0100 1001 –73; 0x4A:0100 1010 –74 Turn_Flag=0; //进入APP方向控制界面 // printf("Turn_Flag=0 进入APP方向控制界面 \r\n");// if(Turn_Flag==0) { //APP摇杆控制界面命令 if(Usart_Receive>=0x41&&Usart_Receive<=0x48) // 0x41:0100 0001–65 ; 0x48:0100 1000 –72 { Flag_Direction = Usart_Receive-0x40; // 例如:(0x42)为01000010 – (0x40)为01000000 = 0010 = 2,也就是66-64=2 } else if(Usart_Receive<=8) // Usart_Receive为0(即0x00=0000 0000); 2(即0x02=0000 0010) …… 7(即0x07=0000 0111);8(即0x08=0000 1000) — 0~8 { Flag_Direction=Usart_Receive;//0、1、2、3、4、5、6、7、8 接收手机app端的方向控制指令 } else Flag_Direction=0; printf("进入APP方向控制界面 Flag_Direction=%d \r\n",Flag_Direction); }// 以下代码内容可选择性参考 else if(Turn_Flag==1) { //APP转向控制界面命令 if (Usart_Receive==0x43) Flag_Left=0,Flag_Right=1; //右自转 else if(Usart_Receive==0x47) Flag_Left=1,Flag_Right=0; //左自转 else Flag_Left=0,Flag_Right=0; if (Usart_Receive==0x41||Usart_Receive==0x45) Flag_Direction=Usart_Receive-0x40; else Flag_Direction=0; } if(Usart_Receive==0x58) RC_Velocity=RC_Velocity+100; //加速按键,+100mm/s if(Usart_Receive==0x59) RC_Velocity=RC_Velocity-100; //减速按键,-100mm/s //以下是与APP调试界面通讯 if(Usart_Receive==0x7B) Flag_PID=1; //APP参数指令起始位 if(Usart_Receive==0x7D) Flag_PID=2; //APP参数指令停止位 if(Flag_PID==1) //采集数据 { Receive[i]=Usart_Receive; i++; } if(Flag_PID==2) //分析数据 { if(Receive[3]==0x50) PID_Send=1; else if(Receive[1]!=0x23) { for(j=i;j>=4;j–) { Data+=(Receive[j-1]-48)*pow(10,i-j); } switch(Receive[1]) { case 0x30: RC_Velocity=Data;break; case 0x31: Velocity_KP=Data;break; case 0x32: Velocity_KI=Data;break; case 0x33: break; case 0x34: break; case 0x35: break; case 0x36: break; case 0x37: break; case 0x38: break; } } //相关标志位清零 Flag_PID=0; i=0; j=0; Data=0; memset(Receive, 0, sizeof(u8)*50); //数组清零 } if(RC_Velocity<0) RC_Velocity=0; } return 0; }/**************************************************************************函数功能:串口2发送数据入口参数:要发送的数据返回 值:无**************************************************************************/void usart2_send(u8 data){ USART2->DR = data; while((USART2->SR&0x40)==0); }
system.h 文件
#ifndef __SYSTEM_H#define __SYSTEM_H#include "stm32f4xx.h"#include "sys.h"#include "delay.h"#include "usart.h"#include "usartx.h"// extern 申明变量定义在别的文件中 system.c//PS2手柄、蓝牙APP、航模手柄、CAN通信、串口1通信控制标志位。这5个标志位默认都为0extern u8 PS2_ON_Flag, APP_ON_Flag, Remote_ON_Flag, CAN_ON_Flag, Usart_ON_Flag; extern u8 Flag_Left, Flag_Right, Flag_Direction, Turn_Flag; //蓝牙遥控相关的标志位extern u8 PID_Send; //向蓝牙APP发送参数的标志位extern float RC_Velocity; //遥控小车的默认速度,单位:mm/sextern float Move_X, Move_Y, Move_Z; //小车三轴目标运动速度,单位:m/sextern float Velocity_KP,Velocity_KI;//速度控制PID参数extern void systemInit(void);//C库函数的相关头文件#include <stdio.h> #include <stdint.h>#include <stdlib.h>#include <string.h>#include <math.h>#include "stdarg.h"#endif
system.c文件
#include "system.h"u8 PS2_ON_Flag=0, APP_ON_Flag=0, Remote_ON_Flag=0, CAN_ON_Flag=0, Usart_ON_Flag=0; //PS2手柄、蓝牙APP、航模手柄、CAN通信、串口1通信控制标志位。这5个标志位默认都为0,代表串口3控制模式u8 Flag_Left, Flag_Right, Flag_Direction=0, Turn_Flag; //蓝牙遥控相关的标志位u8 PID_Send; //向蓝牙APP发送参数的标志位float RC_Velocity=500; //遥控小车的默认速度,单位:mm/sfloat Move_X, Move_Y, Move_Z; //小车三轴目标运动速度,单位:m/sfloat Velocity_KP=700,Velocity_KI=700; //速度控制PID参数void systemInit(void){ //延时函数初始化168MHz时钟 delay_init(168); //初始化串口1 波特率设置为115200 uart_init(115200); //串口2初始化,通信波特率9600,用于与蓝牙APP端通信 uart2_init(9600); }
main.c文件
#include "system.h"int main(void){ systemInit();//初始化 while(1){}}实验效果:
串口调试助手显示接收到的指令。
本文地址:https://www.cknow.cn/archives/62473
以上内容源自互联网,由百科助手整理汇总,其目的在于收集传播生活技巧,行业技能,本网站不对其真实性、可靠性承担任何法律责任。特此声明!
如发现本站文章存在版权问题,烦请提供版权疑问、侵权链接、联系方式等信息发邮件至candieraddenipc92@gmail.com,我们将及时沟通与处理。
相关推荐
-
电脑怎么清理垃圾使电脑变得快,电脑怎么清理垃圾干净流畅
电脑用久了,运行速度越来越慢,其实这是因为电脑运行时产生了太多的垃圾文件,我们可以通过清理垃圾文件,加快电脑的速度。 今天和大家分享5个方法,瞬间释放20G!步骤超详细,建议收藏保…
-
win10点文件夹右键就会卡住,win10点击文件夹右键就一直转圈
很多使用过win11系统的用户都反映说在win11当中右键文件夹经常会出现卡死的情况,那么当我们遇到win11右键文件夹卡死怎么办的现象该怎么办呢,下面,小编就把win11右键文件…
-
中税打印机官网,合力中税打印机驱动去哪下载
有时候我们需要连接打印机,需要安装对应的驱动,网上的驱动一搜一大把,但是下载安装之后会无缘无故的安装了一大堆其它我们不需要的软件,那是因为网上下载的驱动被捆绑了其它的软件, 那我们…
-
万能破解手机锁屏图案大全,手机锁屏常用的解锁图案大全
手机锁屏密码忘了,一招教会你秒破解! 安卓手机锁屏密码忘了怎么办?先别着急换新的,教你一招轻松解决,数据不好我会立马隐藏! 打开手机的时候会发现自己经常忘记自己的锁屏密码,怎么打都…
-
最新游戏机推荐排行榜,最便宜游戏机推荐排行榜前十名
心里总想买点啥?看看【必买】,全网最有料的场景种草指南! 老一代人社交是一起喝酒、打牌、坐在一起聊八卦,但现在新青年们的社交要干点啥呢?之前那些似乎都有点老套,不知道你们咋样,我身…
-
学信网怎么查学历提升,如何在学信网查询自己的学历
学信网就像一面照妖镜,假学历,伪造学历通通无法遁形。 登录中国高等教育学生信息网(学信网) 在了解如何在学信网上查询自己的学籍,学历信息前,我们先来弄清楚几个概念。 [微风]1. …
-
电脑时间同步一直出错怎么办,电脑时间无法同步如何修复
在控制面板上,您可以配置设置,使 Windows 自动将日期和时间与 Internet 时间服务器同步,以确保显示准确的时间。 注:如果您的电脑是域的一部分,则 Internet …
-
笔记本键盘fn功能切换,笔记本怎么切换fn键盘
最近笔记本市场新品很多,或者是OLED屏幕笔记本,或者是高分屏笔记本,而戴尔也推出了新品,配置3K屏幕,16英寸大屏,但却没有小键盘,让产品操作面变得十分宽敞。 这款笔记本是戴尔的…
-
暴雪战网怎么改国际服,暴雪战网国际版怎么下
暴雪战网怎么改成国际服,这个问题有很多小伙伴都问过,绝大多数人都不知道怎么修改,大家都知道战网国际服的游戏非常多,并且过几天就要内测守望先锋2,还有免费玩到使命召唤16等,都是让大…
-
炒股用什么软件好,新手炒股适合哪个app
今天我真的憋不住了,我作为一名有几十年炒股经验的股民,以我的经历和眼光,我们大家来分析那些卖炒股软件的骗子们。这些骗子首先骗一些年轻人,因为他们刚从学校出来踏上社会,也想赚快钱,对…
-
外星人电脑多少钱值得入手,外星人电脑最便宜的多少钱
近些年电脑硬件技术提高了不少,无论是网店还是实体店都推出了不少高端电脑,几万块钱的电脑主机也不是什么稀奇的事了,台式机一般只有两种类型:第一种是组装的兼容机。第二种就是品牌电脑。这…
-
为什么能连上wifi却上不了网,能连上wifi却上不了网是怎么回事
Mac能连WiFi但是上不了网,Safari无法浏览网站。遇到这种问题首先看一下自己的MacOS的版本型号,如果是12.X.X的就是老版本,可以通过以下的办法解决。 老版本解决办法…